3D tracking measurements
3D tracking is the process of constructing 3D points from the 2D rays from the cameras and sorting them into trajectories. It is activated with Track the measurement and the 3D option on the Processing page and is controlled by the tracking parameters, see chapter 3D Tracker parameters.
How to set the 3D tracker parameters depends a lot on the measurement setup, for some advice, see chapter Advice on how to set 3D Tracker parameters. For an example of how to evaluate if the tracking is working properly, see chapter 3D tracking evaluation.
Track the measurement with the 3D option is used by default while capturing data. Files can also be reprocessed in case tracking was skipped during the recording, or to optimize tracking results, see chapter Reprocessing a file. For information about how to optimize tracking results in case of problems, see chapter Troubleshooting tracking.
Advice on how to set 3D Tracker parameters
The default parameters for the 3D tracker will yield good tracking results in most situations. However, in some situations, when you notice that the tracking is not optimal, changing the 3D tracker parameters may help to improve the results. When changing these parameters, it is beneficial to have a good understanding of how they influence the tracking. For more information about this, see chapter 3D Tracker parameters and Tracking and accuracy.
Here follows some general advice on how the 3D tracking parameters can be adapted for special tracking situations.
-
Prediction error
The Prediction error is by default set to 25 mm. If you have problems with switching of trajectories it may help to use a lower value. For very fast movements, for example tracking a golf club during a swing, you can use a higher value.
When capturing very fast movements it is important to use a high capture rate for optimal 3D tracking performance.
-
Maximum residual
The Maximum residual is by default set to 6 mm. For very large tracking volumes it may help to increase the value for more robust tracking. Reducing the value may help to avoid switching artifacts, but may lead to more fragmented trajectories. A good way to estimate the Maximum residual is to track the file and then plot the residual of all of the trajectories. Then you can set the parameter two or three mm higher than the maximum residual of the trajectories.
-
Minimum trajectory length
The minimum trajectory length is by default set to 2 frames, which is the minimum value for a part or trajectory. Increasing the value may help to reduce the amount of ghost markers, for example when tracking highly reflective objects.
-
Minimum ray count per marker
The minimum ray count is by default set to 2, which means that a marker can be defined in 3D when seen by two cameras. Increasing the value to 3 or more cameras may help to reduce the amount of ghost markers, for example when tracking highly reflective objects. However, this may come with the disadvantage of more fragmented trajectories.
-
Ray length limits
The ray length limits are by default calculated automatically based on the calibration, but they can also be set manually. Using a certain minimum ray length can help to avoid ghost markers close to the cameras if there are many spurious reflections, for example from a water surface. For very large tracking volumes, it can be useful to set a maximum ray length so that cameras that are at a large distance of a marker are excluded from the calculation of its position.
3D tracking evaluation
Before data collection, it is a good idea to test that the tracking is working properly for the current camera setup. Place all markers required on the measurement subject and also one marker in each corner of the measurement volume. Then perform the following test:
-
Open a new QTM file and perform a capture. The movements should be as similar to the planned recordings as possible.
-
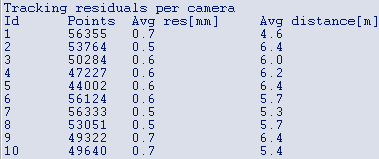
Go to the View menu and open the File information dialog. In the dialog there is a list of the tracking residuals per camera. There are two numbers per camera. Points are the number of 2D points from the camera that are used to calculate 3D in the measurement. Avg res is the average residual for the 2D rays from the camera at the average marker distance in the whole measurement.
-
Check that all cameras roughly have a similar amount of Points. If a camera has much less points, it either cannot see the markers or has moved since the calibration.
-
Check that the Average residual is similar across the cameras. If there is a camera that has a much higher residual a new calibration is needed.
-
-
Check the number of trajectories in the Unidentified trajectories window. Each of the trajectories should represent a marker and therefore the number of trajectories should match the number of markers in the measurement. However, if some markers have been occluded during the measurement there will be some extra trajectories.
-
Check that the markers can be seen in the entire measurement volume by comparing the trajectories data to the four markers placed in the corners of the measurement volume. It is easier to see if the volume is viewed from above (XY- view).
If the tracking test is not acceptable, check the following elements:
-
Check the calibration: A faulty calibration gives erroneous data to the tracking function, see chapter Calibration of the camera system.
-
Check camera positioning: Incorrect positioning results in hidden markers and problems with the calculation of markers; see chapter Camera positioning.
After rearrangement of the cameras, a new calibration is needed.
-
Check the tracking parameters, see chapters 3D Tracker parameters and Advice on how to set 3D Tracker parameters.
-
Check the size of the reflective markers, see chapter Marker size.
For example, if the markers are not visible in 2D views, check the focus, choose a larger marker size, or change the exposure settings (e.g. increase exposure time, or increase the aperture). If there are many merged markers in the 2D views, choose a smaller marker size, or change the exposure settings (e.g. decrease the exposure time, or decrease the aperture).After changing the aperture on a camera with a manual lens, a new calibration is needed.
Tracking and accuracy
Incorrect settings of the tracking parameters may degrade the accuracy of the system.
Setting the Prediction error and the Max residual too low or too high has a negative impact on the accuracy. If the options are set too low, camera data can be discarded that should have been used for calculation of a trajectory, which can result in extra noise and gaps. If they are set too high, the risk increases for false data to be used with the trajectory, which can result in increased noise. However, the likelihood for this is reduced because of the outlier filtering process in the 3D calculation, so it is better to set the parameters somewhat higher than expected.
Setting the Prediction error too high can also increase trajectory flipping, i.e. when trajectories are swapped or get mixed up in other ways.