Linearization
The Linearization page contains information about the linearization of each camera, see chapter Linearization of the cameras. You can also use the checkboxes to include or exclude cameras for tracking.
Camera linearization parameters
Under the Camera linearization parameters heading there is a list of all the linearization files of the connected cameras. In the list you can manage the linearization files and select whether a camera will be used for tracking or not.
Each camera is delivered with its own linearization file (*.lin) stored in its memory. The file name includes the serial number of the camera. When connecting a system for the first time in a project, the linearization files are loaded into the project and downloaded to the C:\ProgramData\Qualisys\Linearization folder of the computer.
The linearization files that are currently loaded in the project are used as the intrinsic calibration parameters of the cameras.
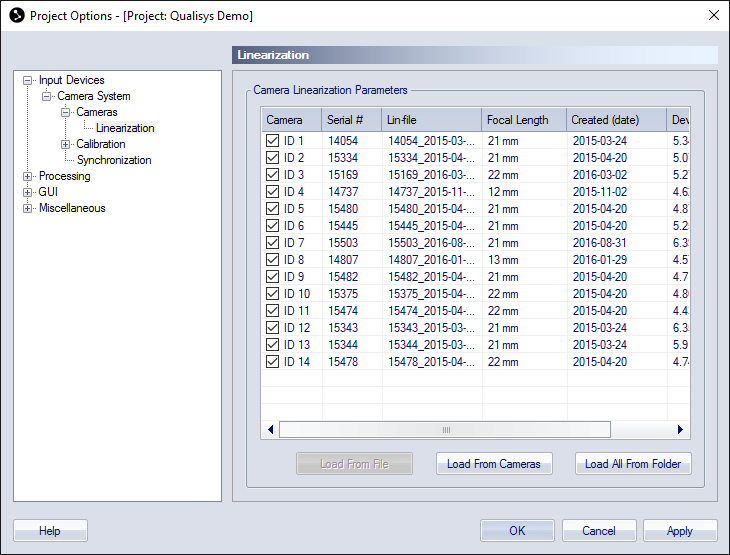
The following information is displayed for each linearization file:
-
Camera
The ID of the camera in the current system.
-
Serial #
The serial number of the camera.
-
Lin-file
Name of the linearization file.
-
Focal Length
The focal length reported in the linearization file.
-
Created (date)
Date of creation for the linearization file.
-
Deviation (CU)
The deviation reported in the linearization file. This is usually a number between 2-4 subpixels (CU).
Managing the linearization files
There are three ways to load the camera’s linearization file into the project. The recommended method is to Load from cameras.
-
Load from file
Select a camera in the list, click the Load from file button, and select a linearization file (*.lin).
With this method, there is no check that the file corresponds to the serial number of the camera, so make sure to select a file that matches the serial number of the camera.
-
Load from cameras
Click on Load from cameras. A dialog appears and QTM starts to load the linearization files from the Qualisys cameras into the project.
-
Load from folder
Click on Load from folder. A dialog appears where you can browse for the folder containing linearization files (*.lin) for the cameras.
If the files are present in the Linearization folder under C:\ProgramData\Qualisys, just click OK. Otherwise, locate the correct folder and then click OK. When you click OK, QTM will look for linearization files that match the serial numbers of the cameras, and choose the ones with the last date in the file name. If it finds the files in the folder the following dialog is shown and the correct files are installed.
When you right-click on a camera, you get a context menu with the following options:

-
Load linearization file ...
Load a linearization from a file into the project, see Load from file above.
-
Upload linearization file to camera
Upload the file that is currently loaded in the project to the camera. You can use this option to replace the linearization file that is currently stored on the camera with a better one.
Uploading replaces the linearization file that is currently stored in the camera, which will affect future tracking in other projects.
When using the Advanced calibration method, the linearization files in the project are replaced with new linearization files.
Selecting and deselecting cameras for tracking
The camera is used if the checkbox in the Camera column is selected. Deselect the checkbox to exclude a camera for tracking.
The camera will still capture data during a measurement even if it is deactivated. Therefore, it can be included again in the measurement by reprocessing the file, see chapter Reprocessing a file. However, if a camera has been deactivated during calibration, the calibration must be reprocessed first, see chapter Recalibration.