2D Preprocessing and filtering
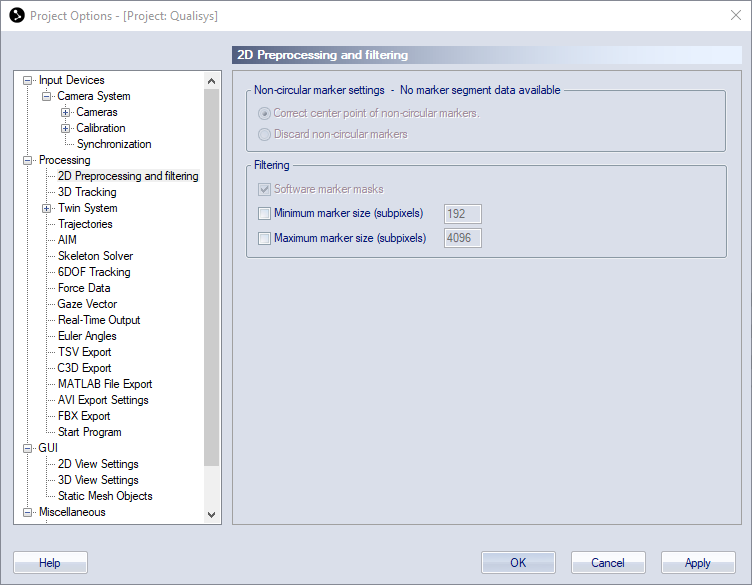
The 2D Preprocessing and filtering page contains settings for the preprocessing of 2D data before 3D tracking.
Non-circular marker settings (Oqus)

Use the Non-circular marker settings to define how to handle the segment data that is sent from the Oqus cameras. The cameras will only send segment data when the Marker circularity filtering option is enabled on the Cameras page, Marker circularity filtering (Oqus). How many markers that have segment data depends on the Circularity threshold on that page.
There can be too many markers considered as non-circular in the camera. In that case there is a red warning in the left upper corner of the 2D view and all the markers that the camera have not been able to check are considered to be OK.
The options for handling non-circular markers with segment data is:
-
Correct center point of non-circular markers
With this option non-circular (partially hidden) markers with segment data are corrected, if possible, before they are used by the 3D tracker. The center point will be more exact for partially hidden markers than the marker calculated by the camera. The correction works best if the marker size is between 500 and 1500 subpixels. If the marker size is below 320 subpixels then the marker is not considered for correction since it is too small to find a good center point for.
If the Marker circularity filtering is not enabled on the Cameras page, then the options are greyed out and the message No marker segment data available is shown. It is the same when reprocessing files that don't have any segment data.
-
Discard non-circular markers
With this option non-circular markers with segment data are discarded so that they are not used by the 3D tracker. This mode is faster than the correction options, so it can be used in some cases when the processing time is important.
For more information about how to use the non-circular marker settings see chapter Marker circularity filtering (Oqus only) and How to use circularity filter (Oqus only).
Filtering
The Filtering option applies software marker masks and size filtering to the 2D data. The option is used on all of the cameras in the measurement. Markers that have been filtered are indicated by a rectangular frame in the camera view in the 2D view window.
-
Software marker masks (only available when reprocessing a file)
Enable software marker masks in reprocessing, see chapter How to use software marker masks.
-
Minimum marker size
Set the minimum size for the 2D marker data in subpixel units to be used in the 3D tracking. For more information about marker size filtering see chapter How to use marker size filter.
-
Maximum marker size
Set the maximum size for the 2D marker data in subpixel units to be used in the 3D tracking.