Outline of how to use real time
The following steps describe how to use real-time and send the data to a real-time client application.
-
Before you start the real-time, make sure that you have an AIM model or 6DOF bodies for the movement that you are going to capture, see chapter Automatic Identification of Markers (AIM) and 6DOF tracking of rigid bodies, respectively.
It is best if the AIM model is specific for the subject that will be captured.
-
Switch on the camera system and start QTM.
-
Open a new file by clicking the New file icon
 .
. -
Open Project options dialog and go to the Processing page.
-
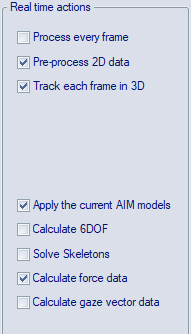
Activate the Real-time actions that you want to use. For example, for Visual3D typically the following actions are used: Pre-process 2D data, Track each frame: 3D, Apply the current AIM models and Calculate force data.
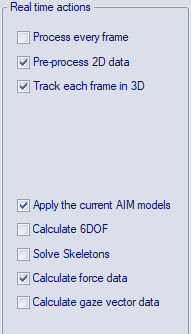
The option Process every frame is disabled by default. QTM will then skip individual frames in case the real time processing exceeds the frame duration, which minimizes the real-time latency by prioritizing the most recent data. When the option is enabled then each frame is processed, which in some cases improves the real-time tracking and identification. However it is important to note that if too many frames exceeds the frame duration, then processing every frame will result in increased real-time latency.
-
Check the settings for the actions that have been selected.
-
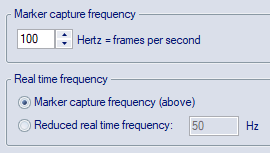
Go to the Camera system page and set the capture rate. The maximum capture rate depends mainly on the computer specifications, as well as the complexity of the AIM model.
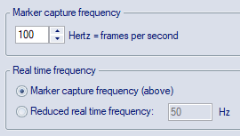
Using a too low real-time frequency may lead to suboptimal 3D tracking depending on the velocity of the movements.
-
Go to the GUI page and set the Real time mode screen update to 15 Hz. This step is not necessary, but it will give the computer more time to process the marker data.
-
Test the real-time with the motion that you want to capture. Look especially at how the AIM model is applied and if the RT frequency shown in the Status bar is close to the capture rate. If it differs too much, lower the Real time frequency, it might also help with a new AIM model or changing the tracking parameters.
-
If the real-time is slow close all windows, including the Data info window and the Trajectory info windows, except for a 3D view window.
-
When the real-time is working fine you can even turn off the GUI on the GUI page in the Projects Options dialog. This will reduce the processing capacity needed by QTM.
-
AIM and 6DOF data can be restarted with the F9 shortcut or the Apply AIM model button
 .
.
-
-
When you are satisfied with the real-time in QTM, you can connect to QTM from the other program or client.
Server mode
QTM can be started in server mode to minimize the interference by QTM when running an RT client. To start QTM in server mode use the command-line argument /server when starting QTM. The modified behavior for the server mode is as follows:
-
QTM is started minimized.
-
Non-critical dialogs are hidden.
-
Crash dumps are automatically sent to Qualisys without user feedback.