Euler angles
On the Euler angles page you can change the definition of the Euler angles used in QTM. The definition applies to all places in QTM where Euler angles are used, displayed or exported, including:
- Rotation of the global coordinate system
- The orientation rigid bodies (6DOF)
- The orientation of skeleton segments
Any changes of the Euler angle definition apply directly to the project or any files that are opened within the project. Files do not need to be reprocessed when changing the Euler angle definition since these settings are not stored in the file.
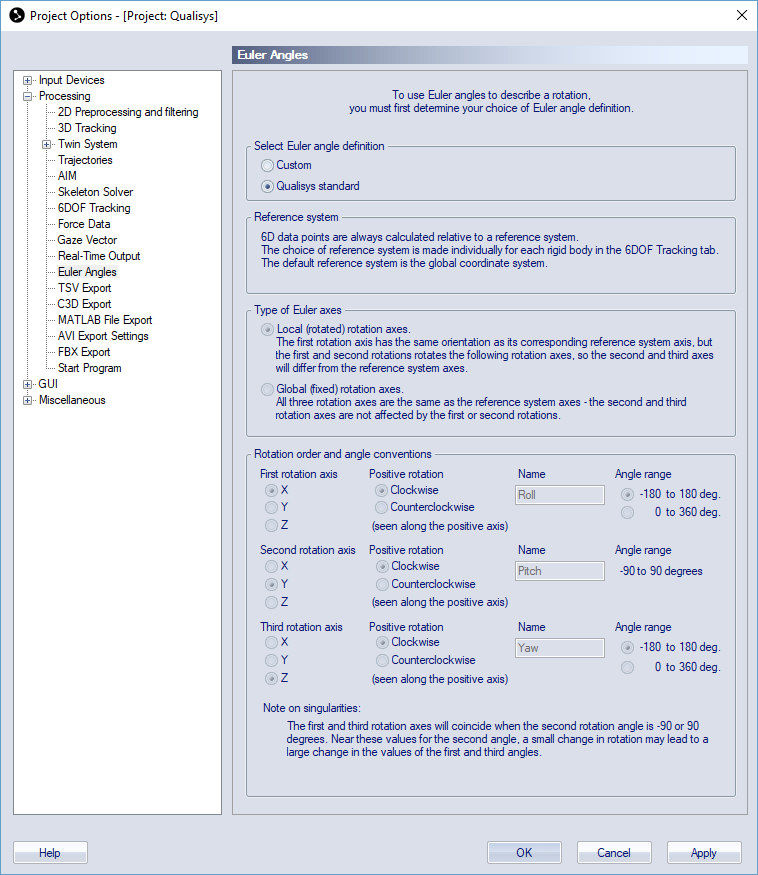
Select Euler angle definition

By default QTM uses the Qualisys standard, which is described in the chapter Rotation angles in QTM. The definition can also be seen when Qualisys standard is selected as the grayed settings under the Definition of rotation axes heading, see screen dump above.
Use the Custom setting if you want another definition of the rotation angles. Then, define the rotation angles by choosing the type of Euler axes and set the rotation order and angle conventions, as described below.
Definition of custom rotation axes
The following settings are used to define custom Euler angles.
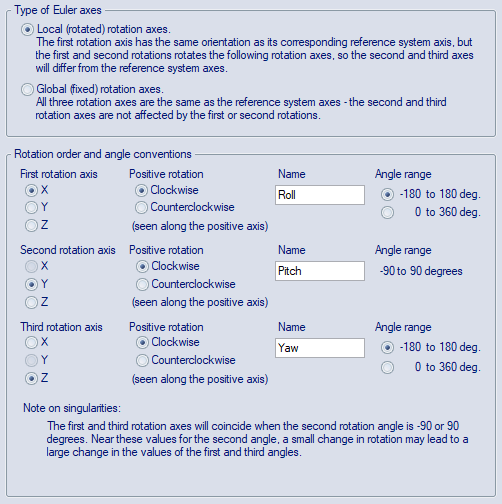
Type of Euler axes
Select the type of Euler axes from the following options:
-
Local (rotated) rotation axes
The rotations will be made around the axes of the local coordinate system, which is most common for Euler angle representations. The first rotation will be around the corresponding axis of the reference coordinate system. The second rotation will be around the second rotation axis of the rotated local reference system, i.e., after the first rotation has been applied. Similarly, the third rotation will be around the third axis of the rotated local reference system, after the first and second rotation.
-
Global (fixed) rotation axes
The rotations will be made round the axes of the reference coordinate system. The default value is the global coordinate system. When calculating the rotations this means that the first or second rotations will not affect the axes of the following rotations.
For rigid bodies, the reference system may be different from the global coordinate system, dependent on the chosen reference coordinate system, see chapter Coordinate system for rigid body data.
Rotation order and angle conventions
Define the rotation order and angle conventions for the custom Euler angle definition.
-
First rotation axis
Define the first rotation axis. This can be any of the three axes.
-
Angle range
Select the angle range of the first axis. It can be either -180° to 180° or 0° to 360°.
-
-
Second rotation axis
Define the second rotation axis. This cannot be the same as the First rotation axis.
Because of the definition of the Euler angles it is not possible to choose range for the second axis. E.g. an angel of -10° is equal to 350°, which means that the range would be split 0° to 90° and then 270° to 350°, see more about the angles below.
-
Third rotation axis
Define the third rotation axis. This cannot be the same as the Second rotation axis. However it can be the same as the First rotation axis.
-
Angle range
Select the angle range of the first axis. It can be either -180° to 180° or 0° to 360°.
-
-
Positive rotation
For each axis you can define the direction of Positive rotation. It can be either Clockwise or Counterclockwise when seen along the positive direction of the axis.
-
Name
For each axis you can set a new name. This name will then be used everywhere in QTM.
To get an unambiguous definition of the rotation there have to be two additional definitions used on the rotation angles. These two definitions are set by QTM, but the second also depends on how you define the Euler angles.
- The rotation angles are always applied with the first rotation first and so on.
- The rotation angles have limitations to the ranges of the angles. The first and third angle is always defined between -180° and 180° or 0° to 360°. But the middle angle depends on the Euler angle definition:
-
First and third rotation round different axes
The second rotation is always defined between -90° to 90° (there are singularities at -90° and 90°).
-
First and third rotation round the same axis
The second rotation is defined between 0° to 180° or 0° to -180°, depending on the order of the axes and the positive rotation (there are singularities at 0° and 180° respectively at 0° to -180°). Check the text at bottom of the Euler angle page to find out which it is for the current definition.