Coordinate system for rigid body data
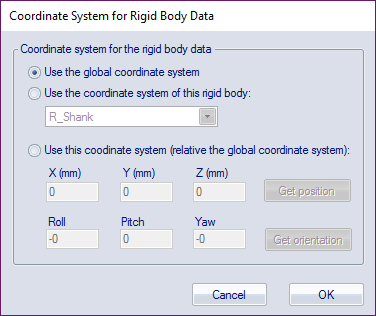
To describe the position and orientation of the 6DOF body its data must be referred to another coordinate system. By default the data is referred to the position and orientation of the global coordinate system. However, with the settings on the Coordinate system for rigid body data dialog you can refer the local coordinate system to the following alternatives of coordinate system origin and orientation.
-
Use the global coordinate system
The position is referred to the origin and orientation of the global coordinate system.
-
Use the coordinate system of this rigid body
The position is referred to the current position and orientation of another rigid body. This means that if the reference body moves the 6DOF body data will change even if that body is stationary. Select the body from the drop-down list.
Using another body as reference will increase the noise in the 6DOF data, especially if there is a long distance between the two bodies. This is because a small rotation error in the reference body will result in a much larger noise in rigid body.
If the reference 6DOF body cannot be tracked the 6DOF body will disappear in the Data info window. However the 6DOF data is always saved and displayed in the 3D view window so that if the file is reprocessed with another reference the 6DOF body will appear again.
-
Use this coordinate system (relative the global coordinate system)
The position is referred to a stationary point defined in the global coordinate system. Define the position in mm in the three directions (X, Y and Z) and orientation in degrees for Roll, Pitch and Yaw.
Roll, pitch and yaw is the Qualisys standard, but if the Euler angles definition are changed on the Euler angles page the new settings will be used in this dialog.
-
With Get position and Get orientation the current position or orientation is acquired. Which means that the data will be zeroed for the current position of the rigid body.