Calibration overview
Calibration teaches QTM the unique characteristics of the cameras and their positions and orientations within the lab’s coordinate system so that 3D data can be accurately tracked.
A calibration depends on two types of parameters: intrinsic and extrinsic.
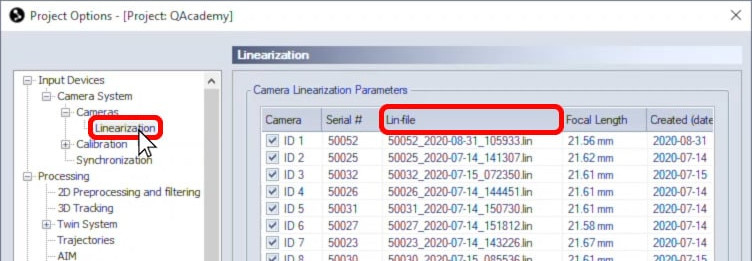
 The intrinsic parameters are calibrated through the linearization process, which is done before the camera leaves the factory. Linearizing a camera factors in the focal length, optical center, and distortion of the lens to ensure a correct mapping of 2D points on the camera’s sensor. The linearization file is stored on the camera and automatically uploaded into QTM.
The intrinsic parameters are calibrated through the linearization process, which is done before the camera leaves the factory. Linearizing a camera factors in the focal length, optical center, and distortion of the lens to ensure a correct mapping of 2D points on the camera’s sensor. The linearization file is stored on the camera and automatically uploaded into QTM.
When needed—for example, if the camera lens is replaced—the process can be redone using a Qualisys linearization plate.

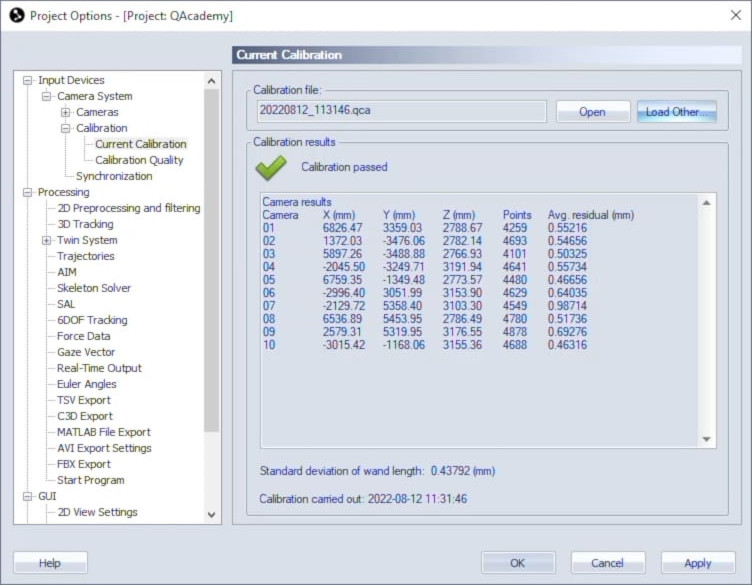
 The extrinsic parameters are calibrated once the cameras are set up and ready to record. During the calibration procedure, each camera collects data from markers attached to reference objects. QTM then uses the data to define the position and orientation of the cameras within the lab’s coordinate system.
The extrinsic parameters are calibrated once the cameras are set up and ready to record. During the calibration procedure, each camera collects data from markers attached to reference objects. QTM then uses the data to define the position and orientation of the cameras within the lab’s coordinate system.
Extrinsic calibrations should be done regularly—for instance, before each capture session and especially if a camera has moved. Because a Qualisys system is so precise, even a slight shift in a camera’s position requires a new calibration to ensure accurate data. Note that it is possible to refine or edit existing calibrations if needed.

Combining the information from the calibration and linearization files allows QTM to track the exact positions of motion capture markers and calculate their locations in 3D space.