All joint angles that are displayed in the report are based on a series of rotations (Grood & Suntay, 1983). These are described with Euler angles, which are the means to describe the orientation of one coordinate system relative to another. The sequence flexion/extension, adduction/abduction, internal/external rotation (Cole, Nigg, Ronsky, & Yeadon, 1993) is used in all cases for the purposes of the running report. This means that the flexion/extension axis is based on the segment coordinate system of the proximal segment, the adduction/abduction axis is a ‘floating’ axis, and the internal/external rotation axis is based on the distal segment.
The pelvis angle is a special case as it is reported relative to a virtual lab coordinate system, but the sequence is identical to that used for the relative joint angles.
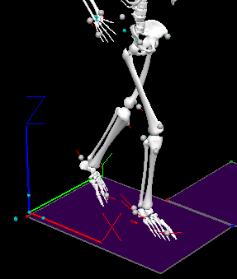
For all global measurements, the coordinate system is typically aligned as shown below:
Alternatively, the running direction can be the -X, +/-Y direction if "Auto detection" is selected for the Running direction (see Step 5 of data collection process).
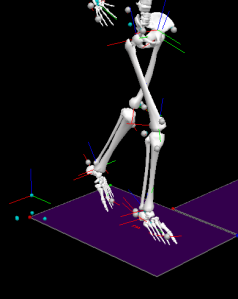
In addition to the global coordinate system, the virtual lab coordinate system is defined with its y-axis pointing in the running direction and the x-axis to the right of the runner:
| Display name | Variable name | Definition Left | Definition Right | Sign convention |
| Vertical Excursion | Vertical Excursion | (METRIC::PROCESSED::Left Vertical Max_MEAN-METRIC::PROCESSED::Left Vertical Min_MEAN)*100, where Vertical Min/Max is the min/max vertical Pelvis COG position | (METRIC::PROCESSED::Right Vertical Max_MEAN-METRIC::PROCESSED::Right Vertical Min_MEAN)*100, where Vertical Min/Max is the min/max vertical Pelvis COG position |
+ Up - Down |
| Foot Angle at Initial Contact | Virtual Foot Angles_IC | Left Foot Progression Angles at left IC event, X-component | Right Foot Progression Angles at right IC event, X-component |
+ Toe strike - Heel strike |
| Hip Extension at Toe Off | Hip Angles_X_TO | Left Hip Angles at left TO event, x-component | Right Hip Angles at right TO event, x-component |
+ Flexion - Extension |
| Pelvis Tilt at Midstance | Pelvic Tilt Excursion | Left Pelvic Angles_maxX_MEAN- Left Pelvic Angles_IC_MEAN::X | Right Pelvic Angles_maxX_MEAN- Right Pelvic Angles_IC_MEAN::X |
+ Pelvis rotates in anterior direction - Pelvis rotates in posterior direction |
| Peak Knee Flexion | Knee Angle_MaxX_Stance | Maximum Left Knee Angle, x-component, between left IC and TO events | Maximum Right Knee Angle, x-component, between right IC and TO events |
+ Extension - Flexion |
| Knee Flexion at Initial Contact | Knee Angle_IC | Left Knee Angle, x-component, at left IC event | Right Knee Angle, x-component, at right IC event |
+ Extension - Flexion |
| Knee Excursion | Knee Flexion Excursion | Left Knee Angle_MaxX_Stance_MEAN- Left Knee Angle_MinX_Stance_MEAN | Right Knee Angle_MaxX_Stance_MEAN::X-Right Knee Angle_MinX_Stance_MEAN::X |
+ Extension - Flexion |
| Strike Position | Strike Position_IC | LSTRIKEPOS at left IC event, x-component, where LSTRIKEPOS is L_FCC2-L_ICT marker position | RSTRIKEPOS at right IC event, x-component, where RSTRIKEPOS is R_FCC2-R_ICT marker position |
+ L_FCC in front of L_ICT - L_FCC behind L_ICT |
| Display name | Variable name | Definition Left | Definition Right | Sign convention |
| Knee Separation | Knee Separation | (vLKJC::Y- vRKJC::Y)*100 at left MS event where vLKJC and vRKJC are landmarks at the knee joint centre using the global reference system. | (vLKJC::Y- vRKJC::Y)*100 at right MS event where vLKJC and vRKJC are landmarks at the knee joint centre using the global reference system. |
+ Increasing distance of knees - Decreasing distance of knees |
| Cross Over | Crossover_MS | Pelvis_COG::X- LHEEL_WRT_VIRTUAL_LAB::X)*100 at left MS event, where both variables are using the virtual lab coordinate system | Pelvis_COG::X- RHEEL_WRT_VIRTUAL_LAB::X)*100 at right MS event, where both variables are using the virtual lab coordinate system |
+ Increasing distance of heel from midline - Decreasing distance of heel from midline |
| Inversion at Initial Contact | Rearfoot Angle_IC | Left Virtual Foot Angles at left IC event, y-component | Right Virtual Foot Angles at right IC event, y-component |
+ Inversion - Eversion |
| Peak Eversion | Ankle Angles_MinY | Minimum Left Virtual Foot Angle between left IC and TO event, y-component | Minimum Right Virtual Foot Angle between right IC and TO event, y-component |
+ Inversion - Eversion |
| Rearfoot Eversion Excursion | Rearfoot Excursion | (Left Rearfoot Angle_IC_MEAN::Y- Left Ankle Angles_MinY_MEAN)*-1 | (Right Rearfoot Angle_IC_MEAN::Y- Right Ankle Angles_MinY_MEAN)*-1 |
+ Inversion - Eversion |
| Knee Valgus | Knee Angle_MaxY | Left Knee Angle, maximum between left IC and TO, y-component | Right Knee Angle, maximum between right IC and TO, y-component |
+ Valgus - Varus |
| Pelvic Drop | Pelvic Drop | Left Pelvic Angles_IC_MEAN::Y- Left Pelvis_MinY_MEAN::X, so the range between pelvic angle Y at IC and the minimum pelvic angle Y before TO | Right Pelvic Angles_IC_MEAN::Y- Right Pelvis_MinY_MEAN::X, so the range between pelvic angle Y at IC and the minimum pelvic angle Y before TO |
+ Opposite hip drops - Opposite hip rises |
| Hip Adduction | Hip Angle_MaxY | Left Hip Angle. Y-component, maximum between left IC and TO events | Right Hip Angle. Y-component, maximum between right IC and TO events |
+ Adduction - Abduction |
| Display name | Variable name | Definition Left | Definition Right | Sign convention |
| Femur vs Foot at Midstance | Foot wrt Femur_MS | Left Foot wrt Femur at left MS event, z-component, where Left Foot wrt Femur is Left Foot Progression Angles-Left Hip Angle | Right Foot wrt Femur at right MS event, z-component, where Right Foot wrt Femur is Right Foot Progression Angles-Right Hip Angle |
+ Inward rotation - Outward rotation |
| Toe Out at Midstance | Toe Out_MS | Left Foot Progression Angles at left MS event, z-component | Right Foot Progression Angles at right MS event, z-component |
+ Toe in - Toe out |
| Tibial Internal Rotation at Midstance | Tibial Rotation_MS | Left Tibial Rotation at left MS event, z-component, where Left Tibial Rotation is the angle between virtual foot and virtual lab. | Right Tibial Rotation at right MS event, z-component, where Left Tibial Rotation is the angle between virtual foot and virtual lab. |
+ Internal rotation - External rotation |
| Peak Knee Internal Rotation | Knee Angle_MaxZ_Stance | Left Knee Angle maximum between left IC and TO events, z-component | Right Knee Angle maximum between right IC and TO events, z-component |
+ External rotation - Internal rotation |
| Hip External rotation at Toe-Off | Hip Angles_Z_TO | Left Hip Angles at left TO event, z-component | Right Hip Angles at right TO event, z-component |
+ Internal rotation - External rotation |
| Hip Internal Rotation at Midstance | Hip Angles_MS | Left Hip Angle at left MS event, z-component | Right Hip Angle at right MS event, z-component |
+ Internal rotation - External rotation |
| Hip External Rotation at Initial Contact | Hip Angles_IC | Left Hip Angle at left IC event, z-component | Right Hip Angle at right IC event, z-component |
+ Internal rotation - External rotation |