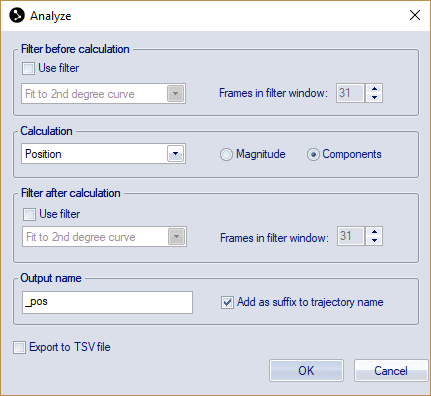
Analyze
Calculations and filters can be applied to the trajectory
data with Analyze on the Trajectory info window menu, .
Select the trajectories that you want to analyze and click on Analyze
to open the Analyze dialog. The dialog can also be opened with
the Analyze trajectory button
![]() on the AIM
toolbar. To export the results to TSV file, check the Export to TSV file option.
on the AIM
toolbar. To export the results to TSV file, check the Export to TSV file option.
Filters
Filters can be applied both before and after the calculation, by selecting Use filter under the respective heading. Set the number of frames that are used for each point in the filter with the Frames in filter window option. The number of frames must have an odd value.
There are two available filters:
-
Fit to 2nd degree curve
This filter uses a 2nd degree curve when processing the data. For each frame, the filter will first find the 2nd degree curve that best fits the data in the filter window around the current frame. Then the data of the current frame is set to the value of that curve at the current frame. -
Moving average
For each frame, this filter first finds the average of the data in the filter window around the current frame. Then the filter sets the data of the current frame to the average found. (This can also be seen as fitting the data of the filter window to a polynomial of degree zero.)
Calculation
Under the Calculation heading there are five parameters that can be calculated:
-
Position
No calculation is performed. Use this setting to filter the motion data, together with selecting Use filter either before or after calculation. Unless the data is filtered or you select the Magnitude radio button there is no difference between the result of the analysis and the original data. -
Velocity
Calculates the velocity of the trajectories. Select Magnitude to calculate the speed. -
Acceleration
Calculates the acceleration of the trajectories. -
Distance
Calculates the distance between two trajectories over time.Distance can only be calculated when just two trajectories are selected.
-
Distance traveled
Calculate the distance that the trajectory has traveled in the measurement. The distance will increase with every frame that marker position has changed more than 0.2 mm compared with the last time the marker moved. The 0.2 mm hysteresis is there to remove the static noise, otherwise a marker that is static will still get a distance traveled over time. If there is a gap in the marker data the distance traveled will restart on 0.Because noise will be added in this sort of analysis the accuracy can be low depending on the settings. The error will be larger with a high capture rate, because for every sample more noise is added to the distance. And even with the hysteresis it is recommended to use a filter to remove noise. Also remove any data in the trajectory that you do not want to add to the measurement, because spikes in the static data will not be removed by the filter or the hysteresis.
-
Angle
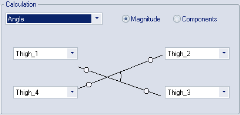
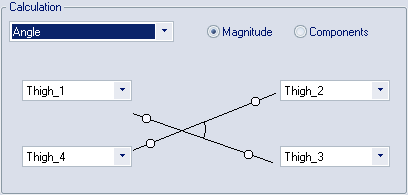
Calculates the angle between two lines in space, using either two, three or four trajectories. Select the trajectories that you want to match with the markers in the diagram to calculate the angle between the lines. For three and four markers the angles are calculated in the range 0 – 180 degrees.-
When four trajectories are selected the dialog looks like this:
-
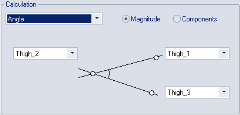
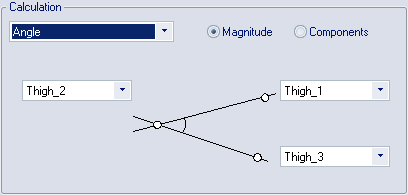
When three trajectories have been selected the dialog looks like this:
-
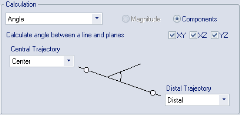
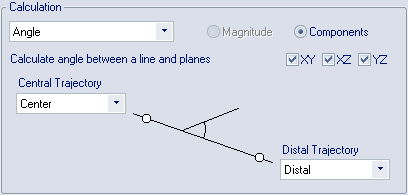
When two trajectories have been selected the dialog looks like this:
-
-
For two markers the angle is calculated between the line and the planes of the coordinate system. Select which planes you want to use with the checkboxes XY, XZ and YZ. The angle is calculated between -90 and 90 degrees. Which sign the angle has depends on how line from Center Trajectory to Distal Trajectory is pointing. For example if you are using the XY plane then the positive side is when the line from central is pointing in the positive Z direction.
The angle between the line and an coordinate axis is the complementary angle to the perpendicular plane according to this formula, "angle to axis"="angle to perpendicular plane" - 90 degrees. -
Angular velocity
Calculates angular velocity for an angle defined in the same way as for the angle calculations (see above). The angular velocity is the first derivative of an angle, i.e. the rate of change of an angle, in degrees per second.Two to four trajectories must be selected to calculate angular velocity.
-
Angular acceleration
Calculates angular acceleration for an angle defined in the same way as for the angle calculations (see above). The angular acceleration is the second derivative of an angle, i.e. the rate of change of an angular velocity, in degrees per second.Two to four trajectories must be selected to calculate angular acceleration.
For each of the calculations it is possible to choose whether the output will be the Magnitude or the Components of the results.
- For Position, Velocity, Acceleration and Distance,
the Components means that the result is shown for the three coordinates
(X, Y and Z) separately. The components of Distance are the distance
projected on the three axes (X, Y and Z).
The Magnitude means that the result is shown as the length of the vector made up of the three components. For Position this means the distance in mm from the origin of the coordinate system and for Velocity this means the speed (in mm/s) of the trajectories. For Acceleration it does not have a separate name, it is simply the magnitude of the acceleration. For Distance, the magnitude is probably the result that is most appropriate, since it is the actual distance between the two trajectories. - For Angle and Angular velocity, the Components means that the angle is projected onto the three perpendicular planes (YZ, XZ and XY respectively), while the Magnitude is simply the angle between the two arms.
Output name
The name under the Output name heading is used in the Plot window and in the TSV file. When the Add as suffix to the trajectory name setting is selected the trajectory name is added before the Output name.
The Add as suffix to the trajectory name setting can only be changed when a single trajectory is selected. If more than one trajectory is selected and Position, Velocity or Acceleration calculations are performed, the setting is always selected. Otherwise all the results would have the same name. On the other hand, when Angle, Angular Velocity or Distance calculation is performed, the setting is always deselected, since there are two, three or four trajectories selected but the result is a single value.