Refine calibration
Refine calibration is meant to be used in situations where it is hard to place the L-frame. The calibration is then done with only a wand, this however means that coordinate system rotation and position can change since there is no reference for the coordinate system. If the position of the coordinate system is critical then it is highly recommended that you either have other markers that can define the coordinate system after refine calibration or that you use the calibration with L-frame. There is no automatized way to use other markers to define the coordinate system so you need to calculate the rotation and translation in another program and then use the Transformation page to update the current calibration.
It is required that the wand can be tracked in the old calibration to be able to refine the calibration. This is because the old wand positions are used to translate and rotate the coordinate system to the best position. This means that if all cameras have moved a lot then refine is not possible to use. However just one cameras or a few cameras can be moved to a completely new position as long as the wand can be tracked and refine will still work.
To use refine calibration start preview and then select Refine calibration on the Capture menu. Refine calibration uses the same settings as a standard calibration, but in the result you get some extra information.
Extra results for refine calibration:
-
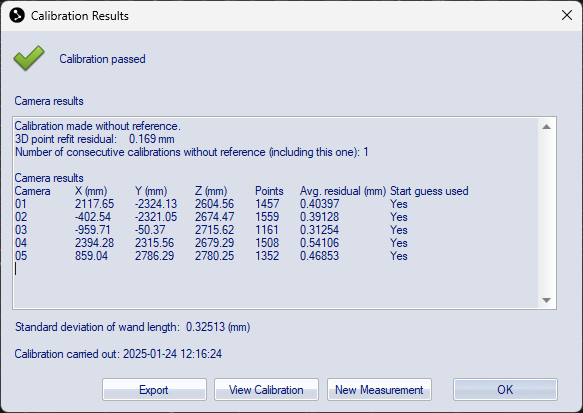
3D point refit residual
The refit residual is a value on how well the new positions of the wand matches the wand positions using the previous calibration. It is impossible to give exact values of when the residual is low enough, since it depends on the volume that is calibrated. However if the Refit residual is higher than 1 mm, then there is a warning in the results because it is likely that the position or rotation has changed. -
Number of consecutive calibrations without reference
The the number of calibrations that has been done without an L-frame. The changes in positions of the coordinate system will increase with each new refine calibration. It is not recommended to do more than 5 without an L-frame, unless you have other markers that are used to define the coordinate system in reprocessing. -
Start guess used
This displays whether the old calibration position was used as the start guess. For example it will be No if you have moved a camera.