Cometa QTM settings
The Cometa page, with settings for the Cometa EMG, is included in the Project options dialog when Cometa is activated on the Input Devices page.
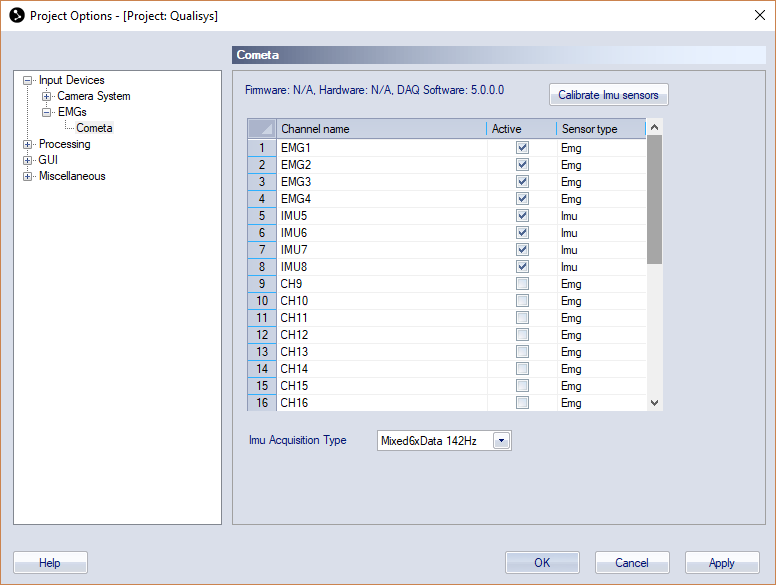
The following settings are available for Cometa EMG.
-
Calibrate Imu sensors
Press to calibrate the used IMU sensors to compensate for gyroscope and accelerometer offset. When using fused data, the current orientation of the sensors is set as start position. -
Channels
-
Channel name: Name of the channel. Click in the text area to edit.
-
Active: Check sensors that are currently used for data acquisition in QTM.
-
Sensor type: Select the type of sensor (Emg or Imu) per channel.
-
-
Imu Acquisition Type
Choose the data type for the used IMU sensors. The options are:-
RawData 284Hz: Acquisition of 3-axis accelerometer (ACC_X, ACC_Y, ACC_Z), gyroscope (GYRO_X, GYRO_Y, GYRO_Z) and magnetometer (MAG_X, MAG_Y, MAG_Z) data at a sample rate of approximately 284 Hz (sample ratio 1/7 of 2000 Hz).
-
Mixed6xData 142Hz: Acquisition of raw and fused data at a sample rate of approximately 142 Hz (sample ratio 1/14 of 2000 Hz). In addition to the raw data, quaternions (Q_X, Q_Y, Q_Z, Q_W) are included representing the orientation of the IMU sensors.
-